@inproceedings{hamilton2022unsupervised,
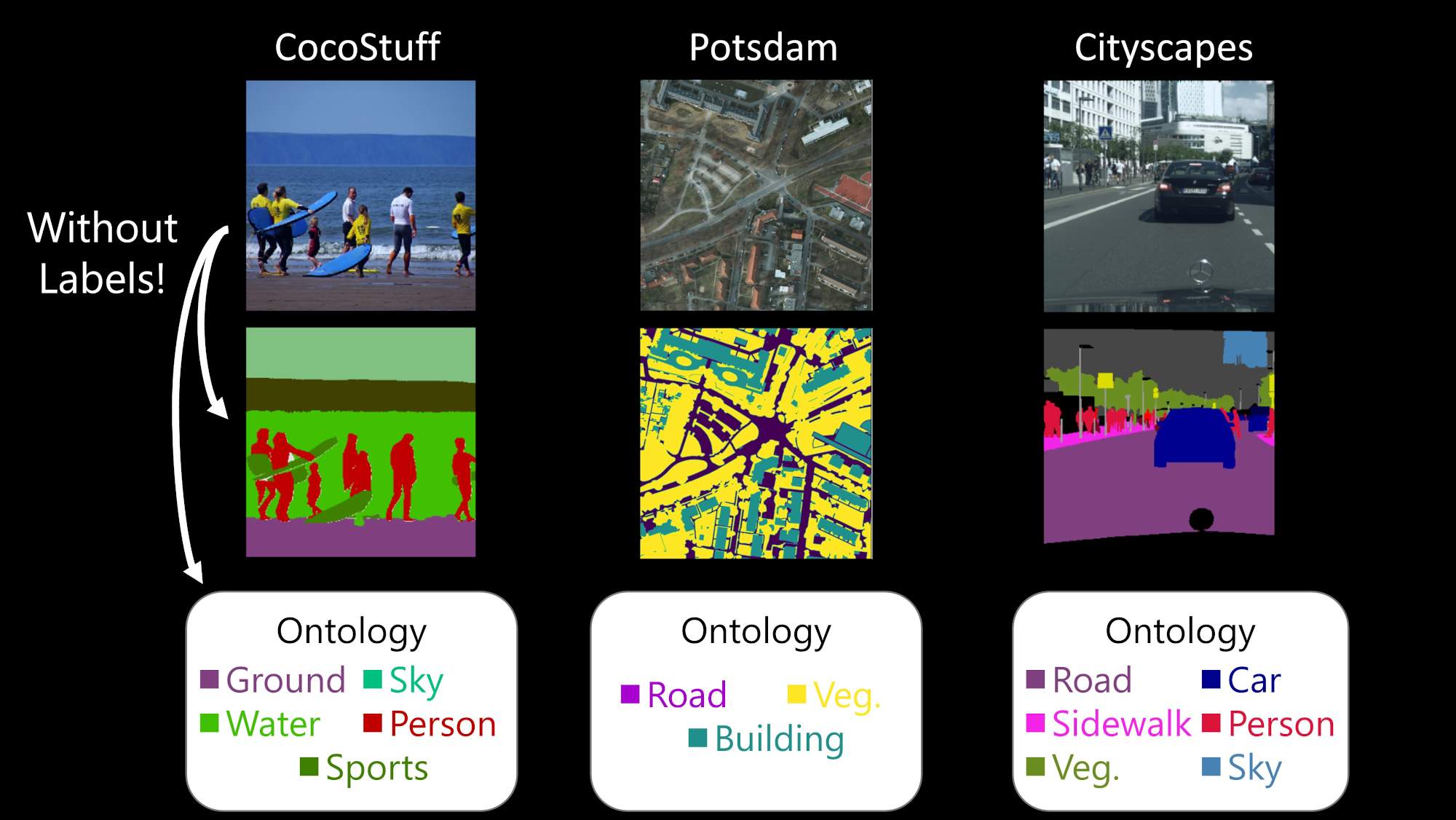
title={Unsupervised Semantic Segmentation by Distilling Feature Correspondences},
author={Mark Hamilton and Zhoutong Zhang and Bharath Hariharan and Noah Snavely and William T. Freeman},
booktitle={International Conference on Learning Representations},
year={2022},
url={https://openreview.net/forum?id=SaKO6z6Hl0c}
}